简介
自动驾驶简介
偶然间看到了 NEMODRIVE Research group profile,
此处提到,第一个自动驾驶是1961年的the Stanford Cart,它使用camera进行避障导航。
50年以来,学术界的研究促进了technology的进步,因此很多automotive companies开始参与自动驾驶的研发(R&D).
Autonomous vehicle 并非一个 device,而是一个system, a collection of inventions applied in a novel way.
The real job is to endlessly improve the software part, powered by machine learning algorithms, to correctly interpret the data from all those sensors.
Nemodrive 组的目标和方案
此组的目标是:
building a level 4 self-driving car for the streets of the UPB campus.
此组目前的方案是:
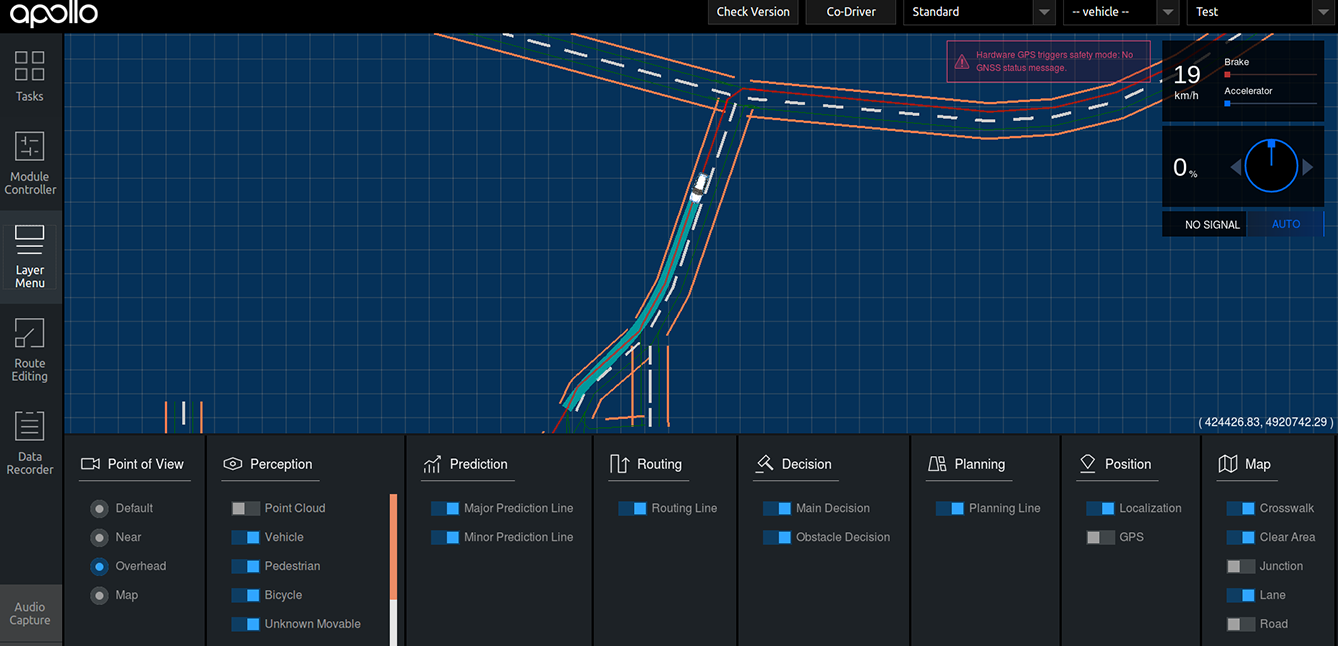
- enhancing a open autonomous driving platform (Apollo Auto) for better localization
- testing the framework with a simulator
- integrating it with the car
- and many more.
方案的可视化
这几个方案对应了几个图,很漂亮,来自Research perspective:
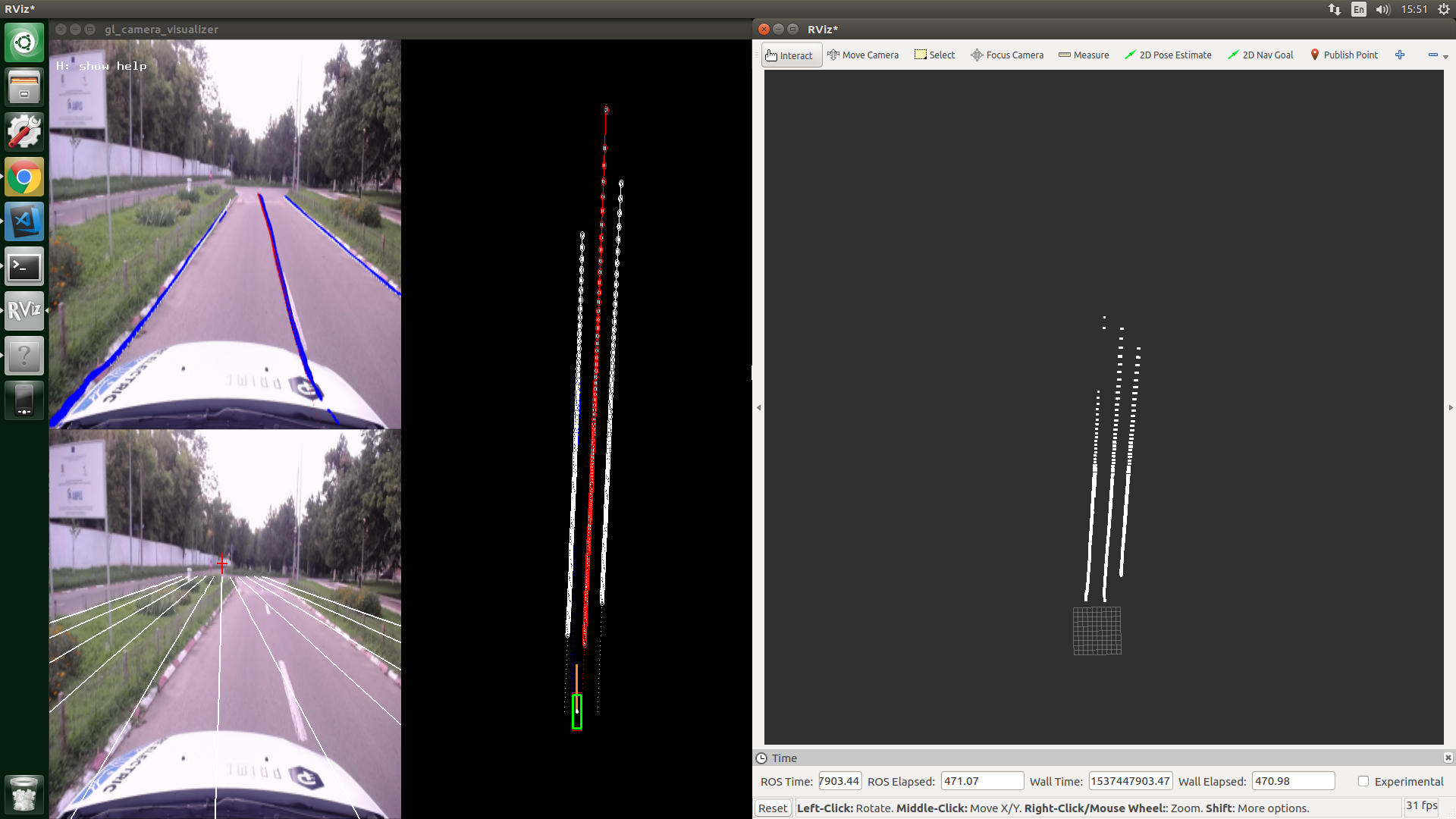
Enhance localization using vision
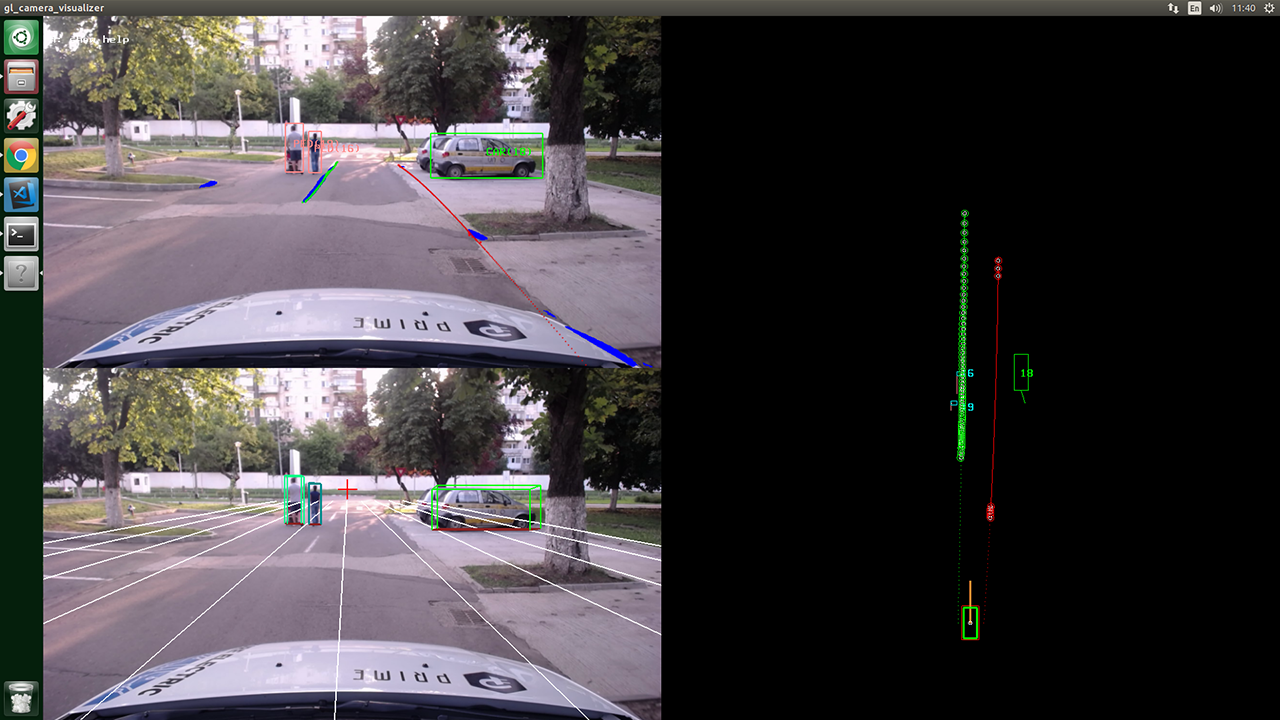
Object detection and depth estimation

End to end driving. Determine steering, acceleration & brake from images

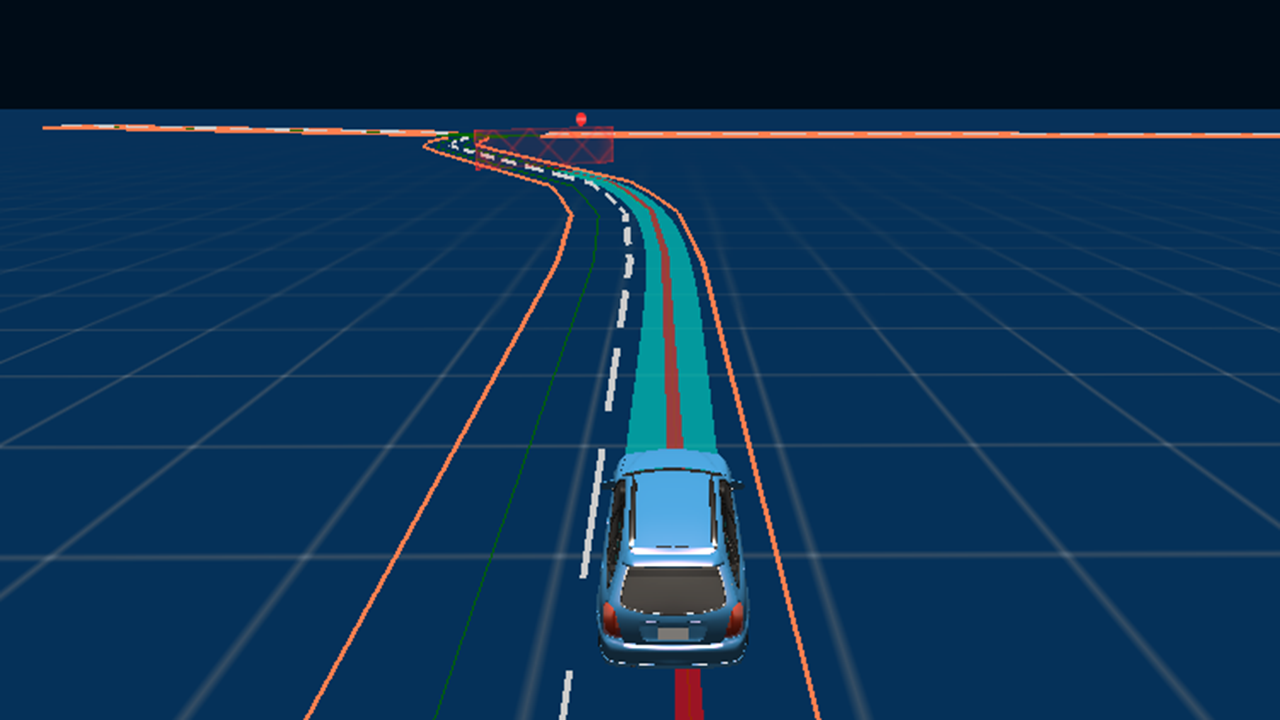
Enhance real data planning decisions using a simulator
定位
以下来自:Localization for Autonomous Vehicles
Apollo framework 中,GNSS和IMU 只能提供 3米 的定位精度,而自动驾驶一般要求小于 10 cm 的误差。
怎么解决呢?两个阶段
第一个阶段
目前打算利用 UPB campus的矢量地图(vector map)+ GNSS和IMU提高精度。
(还提到可以利用基于神经网络的vision algorithms,没提细节)
第二个阶段
使用Camera与 3D-LIDAR, cameras, GNSS and IMU 的组合
如文献:
[5] Seif, Heiko G., and Xiaolong Hu. “Autonomous driving in the iCity—HD maps as a key
challenge of the automotive industry.” Engineering 2.2 (2016): 159-162.
由于 CNN 还没成熟到可以在商用自动驾驶上进行部署,目前只能将 DL 用于替换经典 SLAM pipeline的某些部分。
如:
[3] Milz, Stefan, et al. “Visual SLAM for Automated Driving: Exploring the Applications of Deep
Learning.” Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition
Workshops. 2018.
[4] Heng, Lionel, et al. “Project AutoVision: Localization and 3D Scene Perception for an
Autonomous Vehicle with a Multi-Camera System.” arXiv preprint arXiv:1809.05477 (2018).
目前该组打算利用Apollo Ego Localization,以及这些知识:
sensor fusion, Kalman filtering, Particle filters, robot modeling, machine learning
研究目标(可以借鉴啊)
在open-source自动驾驶平台上搞一个改善的 localization module that uses GNSS, IMU and 2D Camera data。
- 实现多传感器融合的定位方法
- 建立高清地图
- 探索SOTA的多常感器自定位算法,并部署。
原文
- Deploy and evaluate on UPB campus a multi-sensor fusion localization method (GNSS,LiDAR and IMU).
- Build the UPB campus HD Map.
- Explore state-of-the-art full sensor ego localization algorithms and deploy a practical solution for a self-driving car on UPB campus.
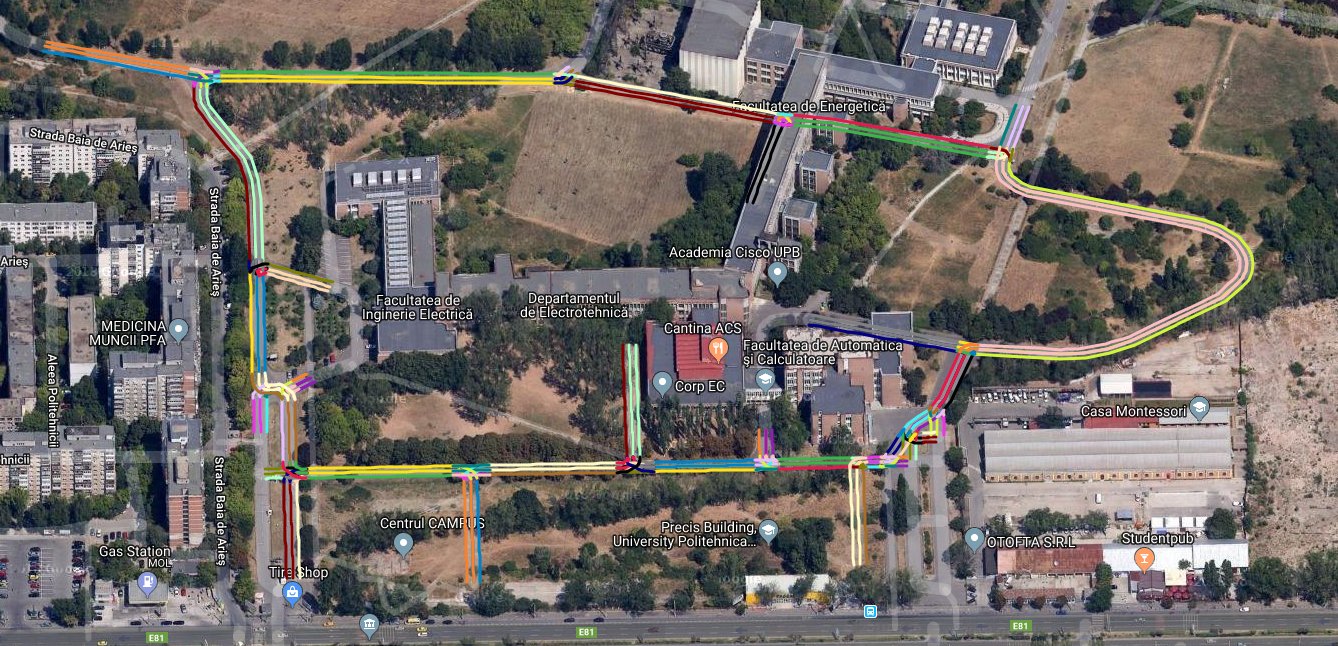
上面提到的 UPB campus 在这里: