- 粗略读后感
- 摘要
- Introduction and Background Material
- Technologies
- Camera Models
- Epipolar and Multi-view Geometry
以下来自:
Sturm, P., 2010. Camera Models and Fundamental Concepts Used in Geometric Computer Vision. FNT in Computer Graphics and Vision 6, 1–183. https://doi.org/10.1561/0600000023
粗略读后感
这篇论文适合了解了所有模型后,猎奇用。
不适合学习相机模型用。
摘要
鉴于 geometric computer vision (“structure-from-motion”) 的 算法和理论研究 经常在没有突出 common underlying principles 的情况下被 re-developed,本文要综述:
- 图像获取方法
- camera model, 并指出不同模型之间的相似性。
- 还有不同相机模型的 极线几何和多视几何(epipolar and multi-view geometry)。
- 标定和自标定算法。
最后描述 geometric computer vision or structure-from-motion 的 fundamental building blocks:
- 极线几何
- 位姿和运动估计
- 3D scene modeling
- bundle adjustment.
Introduction and Background Material
Introduction
相机模型,或者说是 ` a computational model for a camera`, 告诉我们两个信息:
- 如何将 3D 点投影到 image
- 还有back-project,即从 image 到 3D
本文意识到,目前相机模型的分类是不太准确的,因为即使非参模型 其实也是有参的,例如camera rays的坐标。
因此本文分为三类模型:
- A global camera model
任何参数的改变都会影响所有视角( field of view )的投影函数, 例如经典的 pinhole 模型,以及 大多数鱼眼模型 - A local camera model
每一个参数只和视角的某一个子集(a subset of the field of view)的投影函数有关,例如,定义在image或者 field of view 上的多边形区域上的“piecewise-pinhole”模型。 - A discrete camera model
每一个不同的像素点都有对应的参数。当然,一般只定义一部分像素点的参数,然后通过插值得到其他像素点的参数。
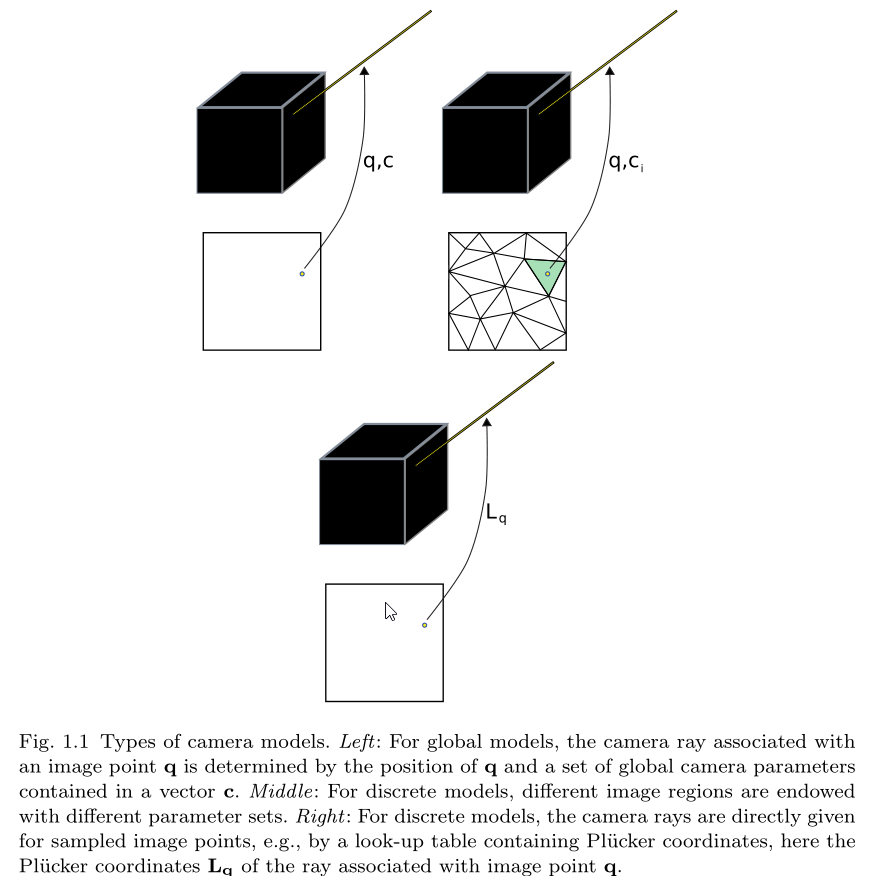
图中,第三个图像就是离散模型,其 camera ray 就是通过 Plücker 坐标的查找表得到的.
上面讲到了相机模型由两部分组成, 本文使用 back-projection来表示相机模型,也就是从像素点到相机光束(camera ray)的映射.
Background Material
Plücker coordinates
首先是 3D 空间中 line 的表示:Plücker coordinates, 也就是说,一个line 可以由一个六维的矢量来表示。
本文讲的比较粗略,详细资料可参考: Notes on Pluc¨ ker Coordinates。
这个坐标的好处是什么呢?
- 这条直线的 direction 矢量 恰好是Plücker coordinates的前三个元素组成的矢量。
- 这条直线与坐标系原点构成的平面的法向量(也就是the moment of the line) 恰好是Plücker坐标的后三个元素组成的矢量。
经过这个line的 direction 矢量 和 moment 矢量能够给 这个line上的点施加两个限制,并最终简化成一个线性方程。
Lifted coordinates
然后是Lifted coordinates。
本文讲的比较粗略,我参考了: Epipolar Geometry of Central Projection Systems Using Veronese Maps
也就是:
Barreto, J.P., Daniilidis, K., 2006. Epipolar Geometry of Central Projection Systems Using Veronese Maps, in: 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition - Volume 1 (CVPR’06). Presented at the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition - Volume 1 (CVPR’06), IEEE, New York, NY, USA, pp. 1258–1265. https://doi.org/10.1109/CVPR.2006.111
在代数中,一个标准技巧就是通过寻找一个 embedding 将问题弄到高维空间,从而使非线性问题转化为线性问题。
上面的参考文献又指出另一个文献:
J. G. Sample and G. T. Kneebone. Algebraic Projective Geometry. Claredon Press, 1998.
Technologies
这一节讲了各种类型的相机的构成。
Camera Models
首先介绍一下Back-projection 和 forward projection的区别。
二者互相定义,但很多情况下,只有其中一种形式比较好表示。
一般来说,back-projection 更加容易进行 formulate。例如,当我们使用点坐标的有理多项式函数来表示相机模型的时候,使用back-projection就会非常直接,然而使用 forward projection就会发现,映射到同一个像素点的 3D 点组成的是一个曲线,也就是 curved
“camera rays”。
Back-projection 一般有两种 formulation:
- 根据像素点计算出 camera ray的两个点: point at infinity $B^i$, 以及 a finite point $B^f$。
此时, - 根据像素点计算出 camera ray的Plücker coordinates $B^l$
全局模型
首先是 Pinhole model, 其image points 和 ray directions的关系为:
\(q\sim KB^i\)
其中 $\sim$ 表示两边差一个scale, $K$ 为内参矩阵。
对于经典的 polynomial distortion models 来说,distortion corrected image points 就对应于普通 pinhole model 的像素点,和 camera ray的关系为:
\(B^i \sim K^{-1}\left(\begin{array}{c}x_u\\ y_u \\1 \end{array}\right)\)
至于其他模型则形式更复杂一些。例如Polynomial and Rational Polynomial Models。
局部模型
包含Two-Plane Model等模型。
离散模型
略。
Epipolar and Multi-view Geometry
略