- Simultaneous 3D Model and Visual Landmark Database Construction
- 下面将介绍 Localization With Landmark Matching
以下来自:
[1]ZHU Z, CHIU H-P, OSKIPER T等. High-precision localization using visual landmarks fused with range data[C]//Computer Vision and Pattern Recognition (CVPR), 2011 IEEE Conference on. IEEE, 2011: 81–88.
Simultaneous 3D Model and Visual Landmark Database Construction
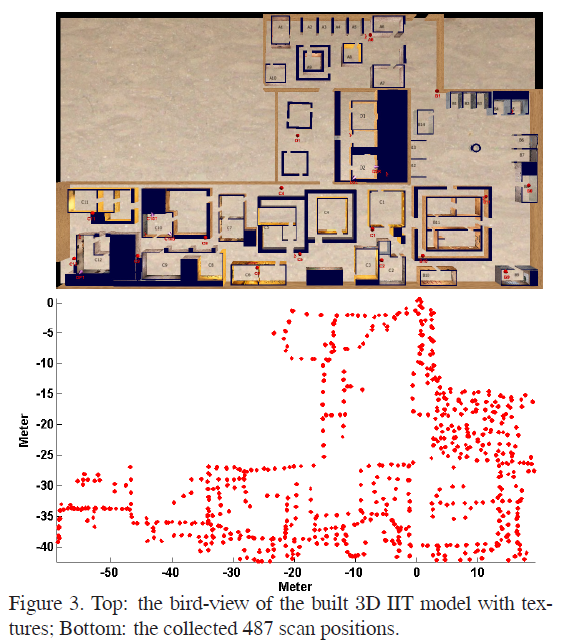
- 用 LIDAR 扫描,通过 ICP 处理重叠的点,这样就生成了点云。
- 生成 visual landmark: 对于每一次的扫描,得到accurate camera pose,2D features(图像特征),以及 3D location
本文建立了包含 487 次扫描的 visual landmark database,大约 1.8GB。
下面将介绍 Localization With Landmark Matching
总体介绍
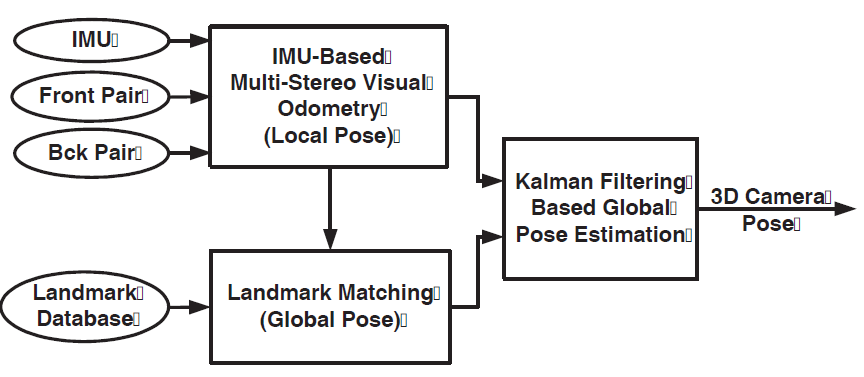
三个模块:
- IMU fused multi-stereo visual odometry,
- landmark matching
- Kalman filtering based global localization estimation
首先加载 visual landmark database。
然后系统获取传感器数据,即
- synchronized stereo image pairs
- IMU measurements。
这俩数据送到 visual odometry module 中。
- 从图像中提取 Harris corners ,并从 Harris corners 中估计相机的初始姿态(
initial camera pose)。 - 上一步得到的
initial camera pose再和 IMU measurements 进行融合,得到相机姿态(当然是局部坐标系的位姿啦)的更为精确的估计。
IMU measurements 的融合主要是考虑到场景中没有texture或者相机被遮挡的情况。
因此,从visual odometry module 可以得到相机在局部坐标系中的位姿。
好了,实际上我们已经有了如下信息:
- stero 相机的左相机的图像
- 提取出来的Harris corners
- 相机的位姿
这三个东西要送到 landmark matching module。在这个module中,我们要为每一个 Harris corners 提取 HOG descriptor。
这样我们就得到了由四个部分组成的query landmark shot:
- the normalized 2D image coordinates
- 3D coordinates
- the HOG descriptors of the corner
- the camera pose
这个 query landmark shot 用于在 the landmark database 中搜索 potential similar landmark shots, 然后使用 image-based 2D matching来精简 potential landmark shot list。
找到matched landmark shot之后,就可以计算相机在全局坐标系中的坐标了。
由于matching直接用于确定全局坐标系中的坐标,因此必须对matching的质量严格把关,作者采用了a visual odometry trajectory based consistency check。
matching之后,由于 landmark matching 可能存在误差,因此需要将这一步估计出来的全局坐标系下的位姿送到一个 global localization module 中,来进一步估计全局坐标。
Efficient Landmark Matching with Disk-Cache Mechanism
略过
Local Visual Odometry Trajectory Based Consistency Check
为了提高定位的 robustness,从 matched landmarks 计算出来的 pose 要先和 visual odometry 计算的pose进行对比,以去除any possible wrong matches,并对landmark matching 施加 temporal consistency。
怎么对比呢,绝对位姿没法比,相对位姿还是可以的。
假设一个对象从 A 点到达 B点,我们可以
- 从visual odometry模块得到一个 A B之间的相对位姿,
- 也可以从matching模块中,提高A,B 图像与landmark database中matching之后计算的位姿得到一个相对位姿。
在短时间内,我们认为 visual odometry得到的相对位姿更准确,因此如果这俩相对位姿比较一致,那么就认为matching就很good。
Kalman Filter Based Fusion for Global Localization
我们要估计每一帧在全局坐标系中的位置
这一步其实就是将IMU-based multi-stereo visual odometry module 估计得到的 local pose,
转换 到
从第一个成功的landmark matching估计得到的 global camera pose 所在的全局坐标系。
本文的基于 Kalman Filter 的 global pose estimation module 的输入为:
- the query landmark shot (2D)
- matched database landmark shot (3D)
- the estimated global camera pose of the query shot
然后,从 IMU-based multi-stereo visual odometry module 转换 得到的 global pose 再和Kalman filter得到的 global landmark point measurements 进行融合。
此处的
global landmark point measurements怎么得到的呢?就是2D to 3D的特征点的匹配啦,即the query landmark shot中的特征点 和 matched database landmark shot 中的 3D local point cloud 进行匹配。
我们要使用 estimated global pose of the query shot,将 每一个 3D local landmark point ${\bf X}$, 转化到 全局坐标系。
将姿态表示为:\({\bf P}_{LG}=[{\bf R}_{LG},{\bf T}_{LG}]\),那么 \({\bf X}\) 就可以按照如下方程进行转换:
\({\bf Y}={\bf R}_{LG}{\bf X}+{\bf T}_{LG}\)
在 small error assumption 的时候,上式可以表示为:
\(\hat{\bf Y}+\delta {\bf Y}\simeq ({\bf I}-[{\mbi \rho}]_{\times})
\hat{\bf R}_{LG}(\hat{\bf X}+\delta {\bf X})+
\hat{\bf T}_{LG}+\delta {\bf T}_{LG}\)
我不知道为啥这里是减号而不是加号。
这里的 $\rho$ 是一个小的旋转矢量。
上式展开,忽略掉二阶项之后就得到如下的 线性化 :
\(\delta {\bf Y}\simeq \hat{\bf R}_{LG}\delta {\bf X}+\left[\hat{\bf
R}_{LG} \hat{\bf X}\right]_{\times}{\mbi \rho}+\delta {\bf T}_{LG}
\eqno{\hbox{(3)}}\)
令 \(\tilde{\bf X}=\hat{\bf R}_{LG}\hat{\bf X}\)。
那么 local 3D (landmark) point 的 协方差矩阵 ${\bf \Sigma}_{Y}$ 可以在全局坐标系中使用如下的项进行表示:
- local reconstruction uncertainty, ${\bf \Sigma}_{X}$,
- the weight factor of the query landmark shot, ${\mbi W}$, 并将其建模为
query landmark shot和matched landmark shot之间的距离,它反映了landmark matching的精度。 - landmark pose uncertainty in rotation and translation, ${\bf \Sigma}R_{LG}$ and ${\bf \Sigma}T_{LG}$
即:
\({\bf \Sigma}_{Y}\simeq\hat{\bf R}_{LG}(W{\bf \Sigma}_{X})\hat{\bf R}_{LG}^{T}+ [\hat{\bf X}]_{\times} {\bf \Sigma}R_{LG} [\hat{\bf X}]_{\times}^{T}+ {\bf \Sigma}T_{LG}\)
将上述步骤应用到 successful landmark matching 的 所有的 point correspondences
然后使用下面文献的方法将所有的 point correspondences融合到Kalman filter中:
A. Mourikis and S. Roumeliotis. A multi-state constrained kalman filter for vision-aided inertial navigation. In IEEE Conference on ICRA’07, 2007. 81, 85