以下来自:
[1]CAI H, HU Z, HUANG G等. Integration of GPS, Monocular Vision, and High Definition (HD) Map for Accurate Vehicle Localization[J]. Sensors, 2018, 18(10): 3270.
摘要
本文:
- 在卡尔曼滤波的prediction step,使用黑箱模型而非常用的运动学模型(Kinematic model)
- 卡尔曼滤波的观测数据分为两部分,一个是raw GPS coordinate,另一个是(从单目相机计算出来的)车辆和车道线之间的距离。
本文方法
地图
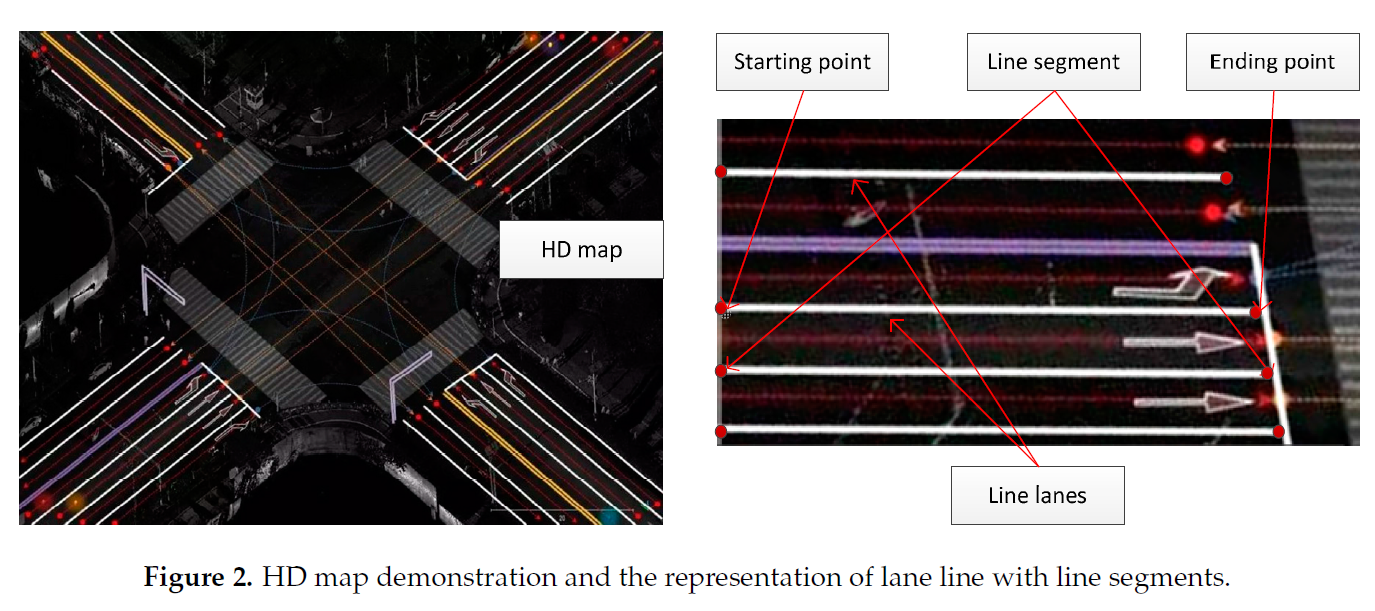
将地图的坐标转换成 UTM 坐标,并使用方程表示每一个 line segment:

其中,$(n_x,n_y)$ 为单位法向量, d 为到原点的距离。
测量数据
车道检测采用如下文献的方法:
- Li, J.; Mei, X.; Prokhorov, D. Deep neural network for structural prediction and lane detection in traffic scene.
IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 690–703. [CrossRef] [PubMed]
相机的标定采用:
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000,
22, 1330–1334. [CrossRef]
然后利用路面的法向量,计算路面和图像之间的单应变换,据此可以算出车辆与车道线之间的距离。

这里的d应该就是后面提到的 $d_v$。
Data-Driven Motion Model for State Transition
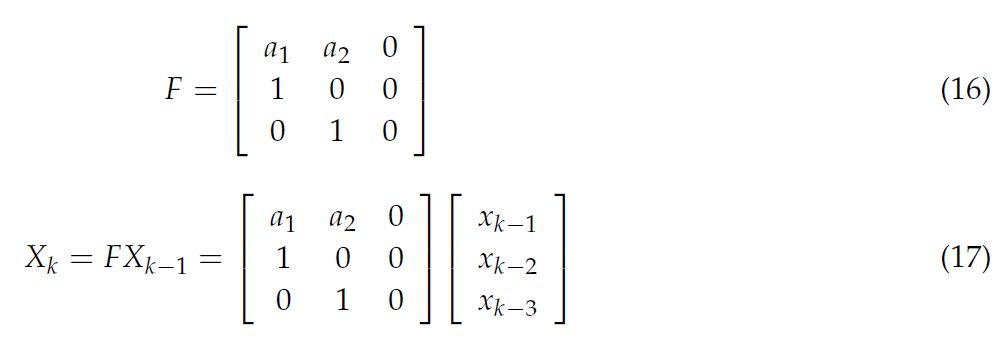
状态转移矩阵的求取比较简单。
首先根据
![]()
得到这些系数以后,就得到状态转移矩阵了:
观测数据
测量数据分为两部分。
第一部分是gps测量:
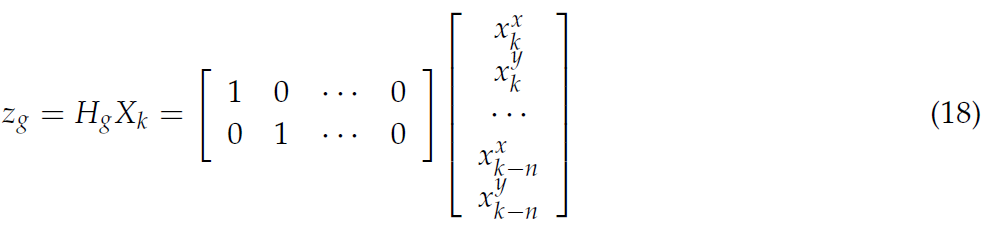
这个测量值确定了测量矩阵的一小部分。
第二部分就是利用上面的节提到的车辆到旁边的车道线的距离了。(当然也可以同时计算车的左右车道线的距离,下面以检测到一个车道线为例)。
根据当前GPS坐标,确定临近的车道线,然后将gps坐标代入该车道线的方程,即可得到点到直线的距离:

也就得到了第二部分的测量:

最终总的测量如下:
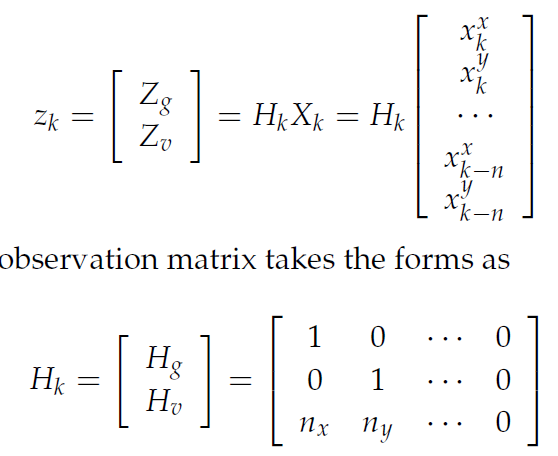
如果是检测到两个车道线,那么观测方程就有四行了。