以下来自:
[1]KIM D, KIM B, CHUNG T等. Lane-Level Localization Using an AVM Camera for an Automated Driving Vehicle in Urban Environments[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 280–290.
摘要
本文
- 利用车辆的环视系统(AVM around view monitoring)的图像和地图进行 ICP 匹配。
- 然后计算地图和图像之间的变换。利用这个变换对vehicle position进行校正,然后和vehicle sensors得到的信息使用 EKF 进行融合。
- ICP 的协方差使用 Haralick’s method 进行估计。
- 达到了分米级的精度。
定位系统 总览
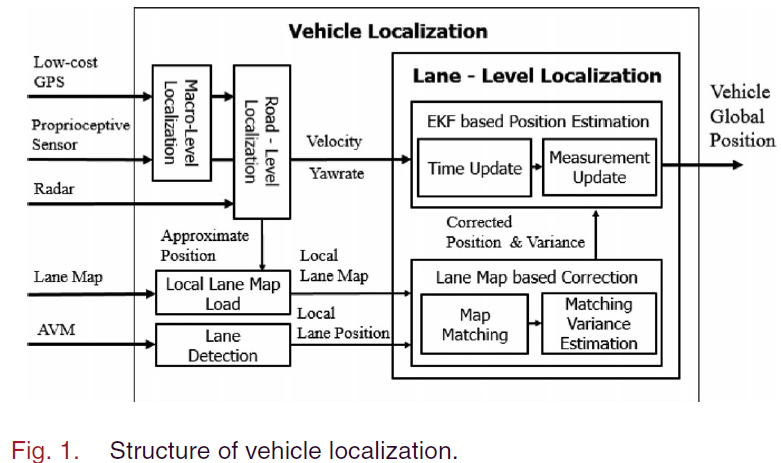
- Macro-level localization。 使用 ,low-cost GPS and proprioceptive sensors,精度为 10m 的量级。
- road-level localization。用来确定在哪个车道。常用作 lane-level localization 的初始值。
- lane-level localization。分米级。
使用 环视系统(AVM)的理由:
- 顶视图可以直接计算与车道线的横向距离。
- 当车的front camera的前视图被遮挡,即周围车辆很多的时候,顶视图还有效。
环视相机的车道线检测
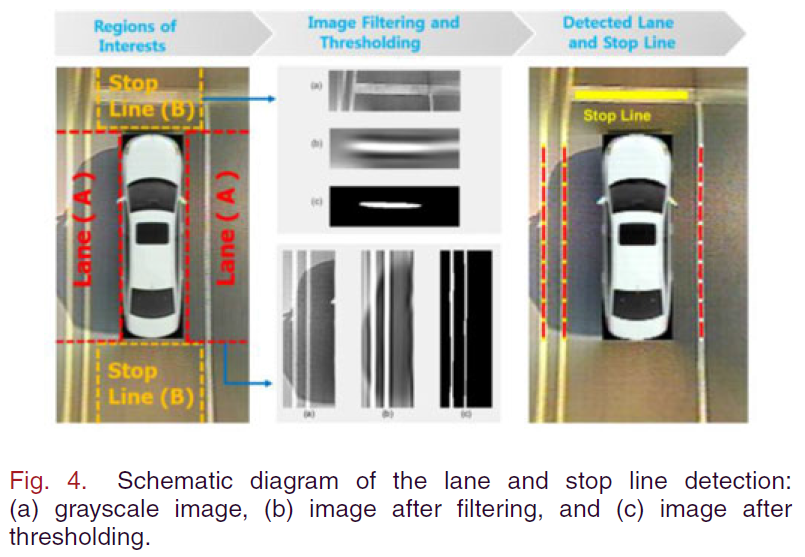
为了计算方便,并考虑到远处的图像有distortion,因此,只处理车辆周围一小块区域的像素,称其为 regions of interest (ROI)。
如上图 a所示。
并且我们只考虑 lane or stop line, vertical or horizontal line 这几种类型。
然后使用 二维 Gaussian kernel,根据期望的线的高度或宽度来设置滤波器的参数,然后将滤波后的图像根据某个阈值进行二值化。
将低于该阈值的像素丢弃掉,高于该阈值的像素投影到车辆坐标系,使用 RANSAC 拟合二阶多项式来表示这些线。
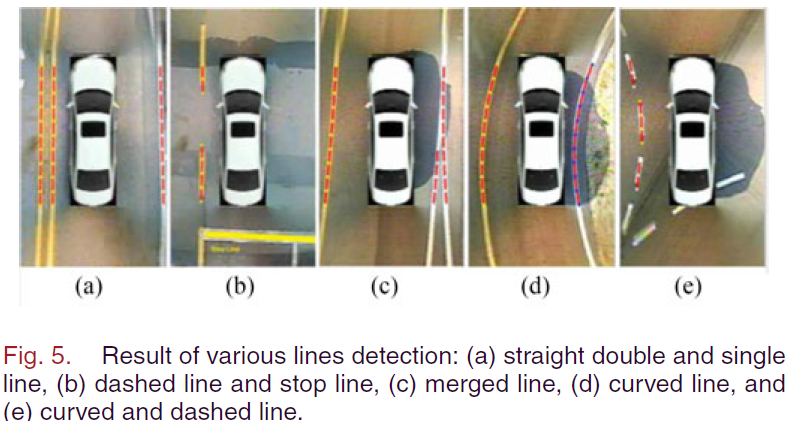
RANSAC algorithm 的两个参数:
- iterations number :设为 50
- threshold distance to determine outliers:设为 0.05m
检测结果如下图:
通过与地图匹配来获得观测数据,即POSITION CORRECTION
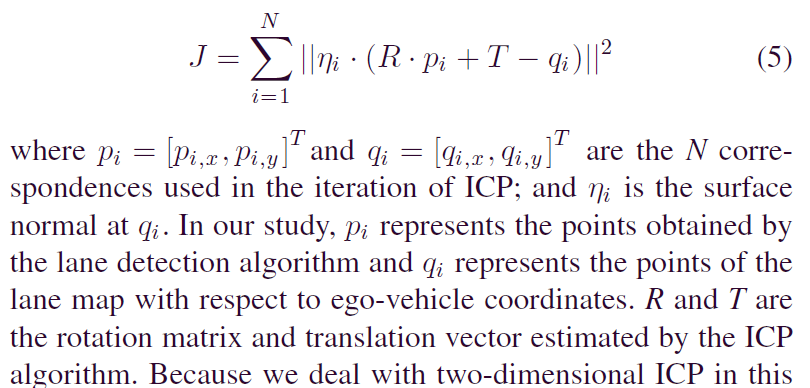
Map-Matching Based on ICP (测量值)
使用 二维 point-to-plane ICP 算法进行匹配。
迭代:
- 计算两个点云的对应关系
- 计算对应点的最小化最小化某个度量函数的变换
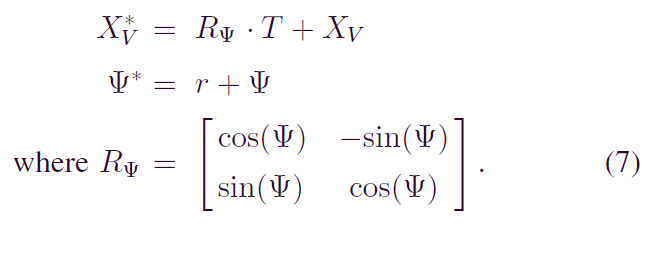
令 $(X_V,\Psi)$ 表示车辆的当前位姿,矫正后的位姿(也就是 观测值啦)为:
协方差 (测量噪声)
然后使用 Haralick’s method 来估算 ICP 的协方差。
LOCALIZATION FILTER
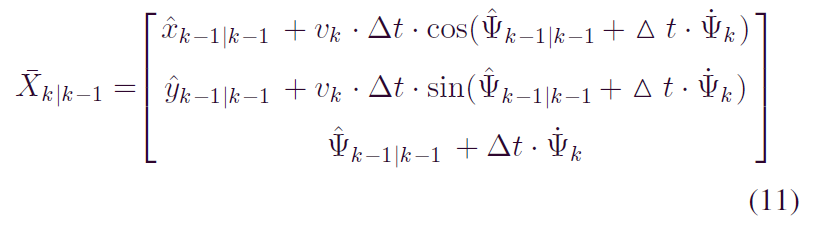
EKF
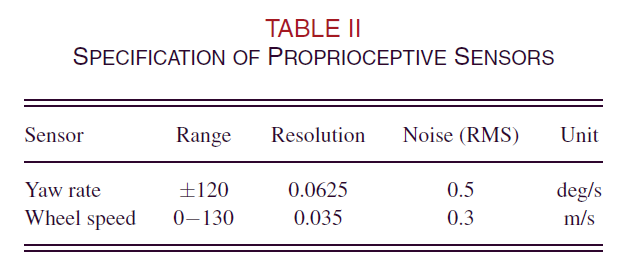
传感器的 process noise:
状态方程很简单:
Validation Gate
对于 false matching,我们当然不能去融合啦。
validation gate就是一个阈值,超过这个阈值,那么这个测量就没法用。
本文采用的是 3sigma 法则(three-sigma gate)。